
 The other thing that arrived today is my new diet Logitech H800 Bluetooth/Wireless headset. It allows me to connect it to my computer with their little custom wireless dongle and to my telephone via Bluetooth. The reason it is a diet headset is that it allows me to not be tethered to my desk while I am talking on the phone or via skype. That is a FINE thing because I get in extra steps and it allows me to either eat more or drop weight more or both.
The other thing that arrived today is my new diet Logitech H800 Bluetooth/Wireless headset. It allows me to connect it to my computer with their little custom wireless dongle and to my telephone via Bluetooth. The reason it is a diet headset is that it allows me to not be tethered to my desk while I am talking on the phone or via skype. That is a FINE thing because I get in extra steps and it allows me to either eat more or drop weight more or both.
Day: January 24, 2018
 Things are happening fast and furious with the bean sorter project. The pre-prototype lights Gene made for me arrived. They are just perfect. He had them all hooked up so all I have to do is flip a switch. In addition, two light controllers arrived in a separate package. Both of the are Pulse Width Modulated dimmers, but one is controlled manually with a dial and the other is controlled digital via a computer–in this case, a RaspberryPi. Can hardly wait for the weekend to see if I can get the control part of this thing going.
Things are happening fast and furious with the bean sorter project. The pre-prototype lights Gene made for me arrived. They are just perfect. He had them all hooked up so all I have to do is flip a switch. In addition, two light controllers arrived in a separate package. Both of the are Pulse Width Modulated dimmers, but one is controlled manually with a dial and the other is controlled digital via a computer–in this case, a RaspberryPi. Can hardly wait for the weekend to see if I can get the control part of this thing going.
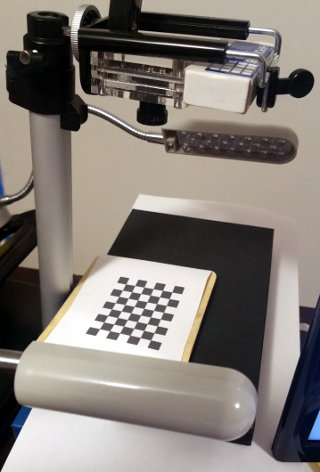 Yesterday, I spent my spare time on creating a camera calibration for our bean sorter project. The purpose of the calibration is to convert measurements of beans in captured images from pixel units to mm units. Images are made up of pixels, so when measurements are performed we know how big things are in terms of pixels. Something might be 20 pixels wide and 17.7 pixels high (subpixel calculations is a topic for another day). Knowing the width of something in an image is pretty worthless because the real world width ( e.g. in millimeters) of that object will vary greatly based on magnification, camera angle and a bunch of other stuff. That is a big problem if the camera moves around a lot.
Yesterday, I spent my spare time on creating a camera calibration for our bean sorter project. The purpose of the calibration is to convert measurements of beans in captured images from pixel units to mm units. Images are made up of pixels, so when measurements are performed we know how big things are in terms of pixels. Something might be 20 pixels wide and 17.7 pixels high (subpixel calculations is a topic for another day). Knowing the width of something in an image is pretty worthless because the real world width ( e.g. in millimeters) of that object will vary greatly based on magnification, camera angle and a bunch of other stuff. That is a big problem if the camera moves around a lot.
Fortunately, in our case, the camera will be in a fixed location and the distance to the falling beans will always be the same. That allows us to make some fixed calculations to convert pixel units to millimeters. To that end, we put a “calibration target” in the cameras field of view at the 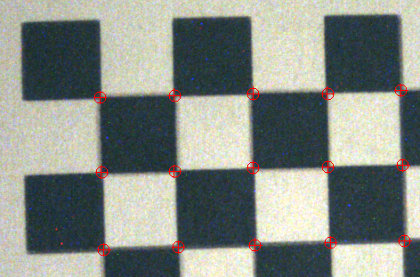 position where through which the beans will fall. In our case that calibration target is a checkerboard pattern with squares of a known size. If we take a picture of the checkerboard pattern, then find the location of each square in the image in pixels, and store that information away.
position where through which the beans will fall. In our case that calibration target is a checkerboard pattern with squares of a known size. If we take a picture of the checkerboard pattern, then find the location of each square in the image in pixels, and store that information away.
Notice the red marks at each intersection of squares in the checkerboard–those are the found pixel positions (e.g. 133.73 pixels from the top of the image and 214.5 pixels from the left edge of the image). We can then convert the positions and sizes of found beans in the image from pixel units to mm units by using equations derived from the know mm sizes of the squares and the found position of the squares in the image as measured in pixel units. I used to have to hand write the equations to do this, but now there are open source libraries for this, so I was able to do the whole thing in an evening.